A continuación te voy a explicar cómo calcular la resistencia equivalente en circuitos con asociación de resistencias en serie, en paralelo y mixtas, es decir, en serie y en paralelo en el mismo circuito.
Resistencia equivalente o resistencia resultante
Antes de empezar a ver cómo calcular resistencias en serie y en paralelo, necesitas conocer el concepto de resistencia equivalente.
La resistencia equivalente, resistencia
resultante o resistencia total de un circuito es una resistencia que es
equivalente al resultado de asociar todas las resistencias de un
circuito:
Con la resistencia equivalente, podemos calcular la intensidad total del circuito y la tensión total del circuito, aplicando la ley de Ohm.
Lo verás más claro conforme vayamos avanzando.
Cálculo de resistencias en serie
En un circuito, las resistencias están en serie
cuando están conectadas una al lado de la otra, es decir, el punto de
salida de una resistencia es el punto de entrada de la resistencia
siguiente:
En un circuito con resistencias en
serie, la intensidad que circula por cada una de las resistencias es la
misma y es igual a la intensidad total del circuito:

Es decir, la resistencia es constante:

Por otro lado, la tensión total del generador es igual a la suma de cada una de las tensiones de las resistencias:

Si aplicamos la ley de Ohm a la tensión
total, tenemos que es igual a la intensidad que circula por el circuito
(común a todos los elementos) por la resistencia total del circuito (que
más abajo te digo cómo calcularla):

La tensión en cada resistencia del
circuito, aplicando la ley de Ohm, es igual a la intensidad del
circuito, por el valor de cada resistencia:

Si escribimos la tensión total como la
suma de cada una de las tensiones de cada resistencia, pero expresadas
como la multiplicación de la intensidad por cada resistencia nos queda:

La suma de la intensidad por cada
resistencia, será igual a la intensidad por la resistencia total, ya que
ambas expresiones son iguales a la tensión total:

Sacamos factor común en el segundo miembro:

Y podemos eliminar la intensidad de cada miembro de la ecuación:

Quedando que la resistencia equivalente
de la asociación de resistencias en serie es igual a la suma de los
valores de cada una de las resistencias siendo ésta su fórmula:

Por tanto, podemos sustituir las resistencias en serie, por su resistencia equivalente en el circuito:
Una vez obtenida la resistencia equivalente, podemos calcular la
intensidad del circuito y la tensión en los extremos de cada una de las
resistencias.
Ejercicio resuelto con resistencias en serie
Vamos a ver un ejemplo de cómo calcular la resistencia equivalente de una asociación de resistencias en serie.
Dos resistencias de 40 y 70 ohmios se
conectan en serie a una tensión de 220 V. Calcular la resistencia total o
la resistencia equivalente, la intensidad que circula por cada una de
las resistencias y la tensión en los extremos de cada resistencia.
Según los datos del enunciado, tenemos el siguiente circuito:

En primer lugar calculamos la
resistencia equivalente del circuito, que como están en serie, es igual a
la suma de cada resistencia:
Sustituimos cada resistencia por su valor y operamos:

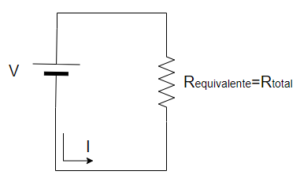
Nos queda por tanto un circuito con una
resistencia equivalente de 110 ohmios, que es el resultado de asociar
las dos resistencias en serie:

Con este circuito, vamos a calcular la
intensidad del circuito, aplicando al ley de Ohm. La intensidad será
igual a la tensión entre la resistencia equivalente:

Sustituimos valores y operamos:
La intensidad de circuito es igual a 2 A.
Una vez tenemos la intensidad, podemos
calcular la tensión en los extremos de cada resistencia, multiplicando
la intensidad por cada resistencia:

La tensión en la primera resistencia será:

Sustituimos la intensidad y la resistencia por sus valores y calculamos:
La tensión en la segunda resistencia es:

Sustituimos la intensidad y la resistencia por sus valores y calculamos:

Date cuenta como si sumamos la tensión
en la primera resistencia y la tensión en la segunda resistencia, el
resultado es igual a la tensión total:

Cálculo de resistencias en paralelo
En un circuito, las resistencias están en paralelo cuando se conectan en los mismos puntos de entrada y de salida:

En un circuito con las resistencias en paralelo, la tensión en los
extremos de cada una de las resistencias es la misma y es igual a la
tensión total del circuito:
Por otro lado, la intensidad total del
circuito es igual a la suma de las intensidades que circulan por cada
una de las resistencias:
Es decir, la tensión total se divide en tantas ramas como resistencias en paralelo haya en el circuito.
Aplicando ley de Ohm a la intensidad
total del circuito, tenemos que es igual a la tensión total (común a
todos los elementos) entre la resistencia total del circuito (que
veremos más abajo cómo calcularla):

La intensidad que circula por cada resistencia es igual a la tensión total entre el valor de cada resistencia:

Que expresando la intensidad total como la suma de los cocientes entre la tensión total y cada resistencia, nos queda:

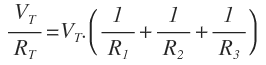
Y ahora sustituimos la intensidad total por su expresión de la tensón total entre la resistencia total:

Sacamos factor común a la tensión total en el segundo miembro:
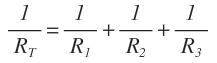
Y eliminando la tensión total en cada miembro nos queda la fórmula para calcular resistencias en paralelo:
Podemos sustituir en el circuito las resistencias en paralelo por la resistencia equivalente calculada por la fórmula anterior:

Y sobre este circuito podemos calcular
la tensión total, la intensidad total y la intensidad que circula por
cada una de las resistencias.
Ejercicio resuelto con resistencias en paralelo
Vamos a ver un ejemplo de cómo calcular la resistencia equivalente de una asociación de resistencias en paralelo.
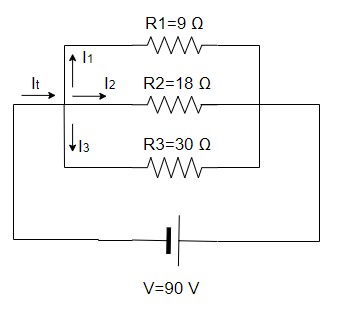
Tres resistencias de 9, 18 y 30 ohmios
se conectan en paralelo a una tensión de 90 V. Calcular la resistencia
total, la intensidad total y la intensidad que circula por cada
resistencia.
Tenemos el siguiente circuito, donde las resistencias están conectadas en paralelo:
Vamos a calcular la resistencia equivalente de la asociación de resistencias en paralelo mediante su fórmula:

Sustituimos las resistencias por sus valores:

Obtenemos denominador común en el segundo miembro para poder sumar las fracciones:
Una vez tienen el mismo denominador, sumamos las fracciones:
Multiplicamos las fracciones en cruz, pasando el 90 multiplicando al primer miembro y Rt multiplicando al segundo miembro:

Ahora despejamos Rt, pasando el 18 dividiendo al segundo miembro y operamos:
La resistencia total o equivalente de las tres resistencias conectadas en paralelo es igual a 5 ohmios.
Nos queda el siguiente circuito equivalente:
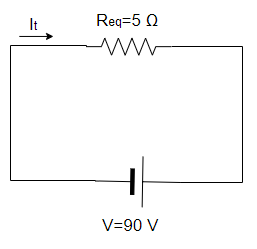
A partir de este circuito podemos calcular la intensidad total, aplicando la ley de Ohm:

Sustituimos los valores de tensión y resistencia y operamos:
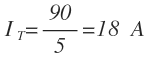
La intensidad que pasa por cada
resistencia es igual a la tensión que hay entre sus extremos, que en
este caso es la tensión total, dividido entre el valor de la
resistencia:

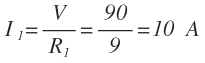
La intensidad que circula por la primera resistencia es:
La intensidad que circula por la segunda resistencia es:

La intensidad que circula por la tercera resistencia es:
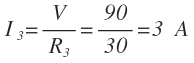
Si sumamos cada una de estas intensidades, el resultado es igual a la intensidad total:

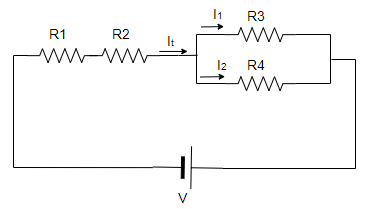
Asociación mixta de resistencias (en serie y en paralelo)
Las resistencias también puedes conectarse en serie y en paralelo en el mismo circuito. En este caso, se denomina una asociación mixta de resistencias:
Para obtener la resistencia equivalente
del circuito, en primer lugar se calcula la resistencia equivalente de
las resistencias conectadas en paralelo con la fórmula vista
anteriormente:

Nos queda entonces un circuito con todas las resistencias en serie:

Ahora, la resistencia equivalente total del circuito la obtenemos sumando los valores de las resistencias:

Quedándonos el siguiente circuito:

En un circuito con resistencias en serie
y en paralelo, podemos obtener muchas magnitudes, como la tensión entre
dos puntos determinados del circuito, la intensidad total o la
intensidad que circula por alguna de las ramas.
En cada caso, hay que utilizar la
resistencia equivalente, la intensidad que circula por cada elemento o
la tensión entre dos puntos más conveniente en cada caso, teniendo en
cuenta que:
- Para las resistencias en paralelo, la
tensión en los extremos de cada una de las resistencias es la misma y la
intensidad por cada una de las resistencias es distinta, dependiendo
del valor de la resistencia y se calcula aplicando la ley de Ohm.
- Para las resistencias en serie, la
intensidad que circula por ellas es la misma y cada resistencia tiene
una tensión distinta, que depende del valor de la resistencia y se
calcula aplicando la ley de Ohm.
Ejercicio resuelto con resistencias en serie y en paralelo
Vamos a resolver un ejemplo paso a paso un circuito con resistencias en serie y en paralelo:
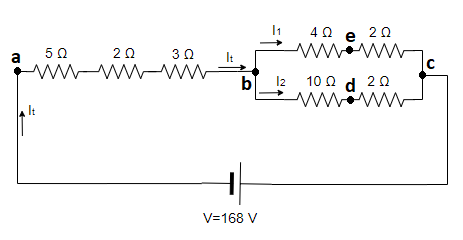
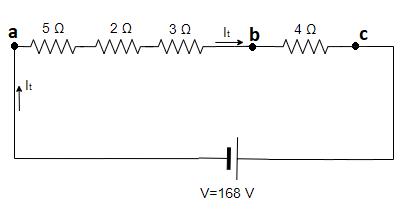
En el siguiente circuito con
resistencias en serie y en paralelo calcular: La resistencia equivalente
del circuito, la intensidad total del circuito, la tensión entre los
puntos a y b (Vab), la tensión entre los puntos b y c (Vbc), la
intensidad que circula por cada resistencia y la tensión entre los
puntos b y d (Vbd).
Vamos a empezar calculando la
resistencia equivalente del circuito. Para ello tenemos que ir
reduciendo el circuito poco a poco calculando resistencias equivalentes
en serie y en paralelo.
Empezamos calculando al resistencia
equivalente de la rama b-e-c. Tenemos dos resistencias en serie, luego
su resistencia equivalente, a la que llamamos por ejemplo Rt1, es:

Hacemos lo mismo en la rama b-d-c que también tenemos dos resistencias en serie. A esa resistencia equivalente la llamamos Rt2:

El circuito nos queda de la siguiente forma:

Seguimos calculando la resistencia
equivalente de asociar las dos resistencias en paralelo Rt1 y Rt2, de 6 y
12 ohmios, a la que llamaremos Rt3. Su fórmula es la siguiente:

Sustituimos Rt1 y Rt2 por sus valores:

Ahora vamos a operar para obtener el valor de Rt3. Obtenemos denominador común en el segundo miembro:
Sumamos las fracciones:
Multiplicamos en cruz, pasando el 12 multiplicando al primer miembro y Rt3 multiplicando al segundo miembro:

Finalmente despejamos Rt3 pasando el 3 dividiendo al miembro contrario y operamos:
El resistencia equivalente Rt3,
resultado de asociar las dos resistencias de 6 y 12 ohmios en paralelo
tiene un valor de 4 ohmios. El circuito nos queda así:
Nos quedan 4 resistencias en serie, cuya
resistencia equivalente, que es la resistencia equivalente del circuito
la calculamos sumando los valores de las resistencias:

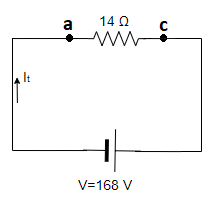
La resistencia equivalente del circuito es de 14 ohmios.
El circuito totalmente reducido es el siguiente:
Con este circuito, podemos calcular la
intensidad total del circuito, aplicando la ley de Ohm con la tensión
total y la resistencia equivalente del circuito:

Sustituimos Vt y Req por sus valores y operamos:

La intensidad total del circuito es de 12 amperios.
Vamos a calcular la tensión entre los
puntos a y b. Para ello, necesitamos conocer la resistencia equivalente
entre los puntos a y b y la intensidad que circula entre los puntos a y
b. Utilizamos el siguiente circuito obtenido anteriormente:
La resistencia entre los puntos a y b la
calculamos sumando los valores de las tres resistencias ya que se
encuentran en serie, resistencia que llamaremos Rt4:

La intensidad que circula entre los puntos a y b es igual a la intensidad total del circuito.
Por tanto, para calcular la tensión entre a y b, aplicamos la ley de ohm con la intensidad total y la resistencia Rt4:
Sustituimos la intensidad y la resistencia por sus valores y operamos:

Para calcular la tensión entre los
puntos b y c, necesitamos conocer la resistencia equivalente entre los
puntos b y c y la intensidad que circula entre esos dos puntos.
La intensidad que circula entre esos dos
puntos es la intensidad total y la resistencia tiene es Rt3, de un
valor de 4 ohmios. Aplicamos la ley de ohm con esos datos:
Sustituimos los valores de la intensidad total y de Rt3 y operamos:

Observa como la suma de la tensión entre
los puntos a y b y la tensión entre los puntos b y c es igual a la
tensión total del circuito de 168 V:

Seguimos calculando las intensidades que
circula por cada resistencia y para ello utilizaremos el siguiente
circuito que obtuvimos anteriormente:
La intensidad que pasa por las
resistencias de 5, 2 y 3 ohmios es la intensidad total, por lo que por
esas resistencias circula una intensidad de 12 A.
Vamos a calcular la intensidad que pasa
por la resistencia de 6 ohmios, Rt1, a la que llamaremos I1. Para ello,
aplicamos la ley de ohm, teniendo en cuenta que la tensión entre los
extremos de esa resistencia es la tensión Vbc:

Sustituyendo los valores de Vbc y Rt1, obtenemos el valor de I1:
Para calcular intensidad que pasa por la
resistencia de 12 ohmios, Rt2, a la que llamaremos I2, aplicamos la ley
de ohm teniendo en cuenta que la tensión entre los extremos de esa
resistencia también es la tensión Vbc:

Sustituimos los valores de Vbc y Rt2 y operamos:

Observa como la suma de estas dos intensidades es igual a la intensidad total:

Finalmente nos queda calcular la tensión
entre los puntos b y d, para lo cual utilizaremos el circuito original,
pero del que ya conocemos todas las tensiones e intensidades:
La tensión entre los puntos b y d,
aplicando la ley de Ohm, es igual a la intensidad que pasa por la
resistencia de 10 ohmios, es decir, I2, multiplicada por el valor de esa
resistencia:
Sustituimos los valores de la intensidad y la resistencia y operamos:

Como ves, en circuitos de este tipo,
previamente debes ir reduciendo el circuito paso a paso, para obtener la
resistencia equivalente total y la intensidad total y luego, ir
teniendo en cuenta la tensión entre dos puntos concreta o la intensidad
que para por cada resistencia para calcular intensidades o tensiones
concretas.


























{kind=link}