
Aprender a controlar motores de corriente continua utilizando controladores basados en puentes H.
Material necesario
- Cables para protoboard

- Plataforma para robot móvil


- Arduino Uno o similar. Esta sesión acepta cualquier otro modelo de Arduino.

- Placa Protoboard.

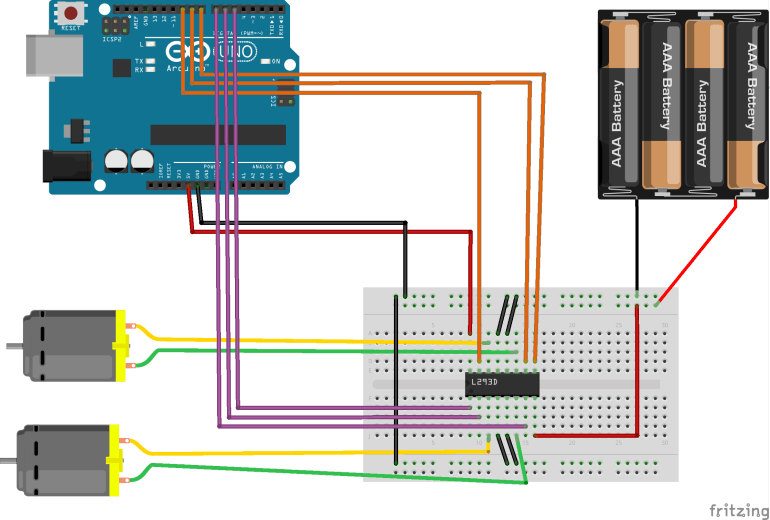
Esquema eléctrico
Programa para conseguir que el móvil se desplace hacia delante durante 1 s.
#define I1 9 // Control pin 1 for motor 1
#define I2 10 // Control pin 2 for motor 1
#define E2 7 //Enable Pin for motor 2
#define I3 6 //Control sentido de giro motor 2
#define I4 5 //Control sentido de giro motor 2
void setup()
{
pinMode( E1,OUTPUT);
pinMode( I1,OUTPUT);
pinMode( I2,OUTPUT);
pinMode( E2,OUTPUT);
pinMode( I3,OUTPUT);
pinMode( I4,OUTPUT);
{
pinMode( i, OUTPUT);
}
}
void loop()
{
digitalWrite(E1, HIGH); // Activamos Motor1
digitalWrite(I1, HIGH); // Arrancamos el motor 1
digitalWrite(I2, LOW);
digitalWrite(E2, HIGH); // Activamos Motor2
digitalWrite(I3, HIGH); //Arrancamos el motor 2
digitalWrite(I4, LOW);
delay(1000);
digitalWrite(E1, LOW); // Paramos Motor 1
digitalWrite(E2, LOW); // Paramos Motor 1
delay(500); }
1 comentario:
Muy bueno profe!!!! Gracias
Publicar un comentario